
目前,仿生干性粘附材料主要依赖范德华力实现粘附,但在物体操纵中通常需要外部能量(如机械载荷或物理场)驱动粘附与脱附的切换,这种非自发的切换行为限制了其在快速响应与大范围载荷操纵方面的应用。自然界中,猪笼草在湿润条件下利用表面液膜使猎物滑落的现象,为开发无需外部能量的自发粘附切换策略提供了重要启示。
西安交通大学邵金友教授、田洪淼教授及王铎睿助理教授团队提出一种受猪笼草捕食现象启发的基于表面润湿性🔎的“干性粘附材料的润湿脱附”策略,通过微流控技术调控粘附微结构与目标表面之间的中间介质,实现无需机械载荷或外部物理场的自发可切换粘附。该策略利用低表面张力液体(如乙醇)在微通道中的自发性浸润与铺展,形成全覆盖液膜,显著降低粘附强度,并在液体挥发后恢复高粘附状态,从而实现对从毫克级到千克级物体的高效、快速操纵。该研究成果以“Wetting Detachment for Dry Adhesives”为题,发表在《Advanced Functional Materials》期刊上。
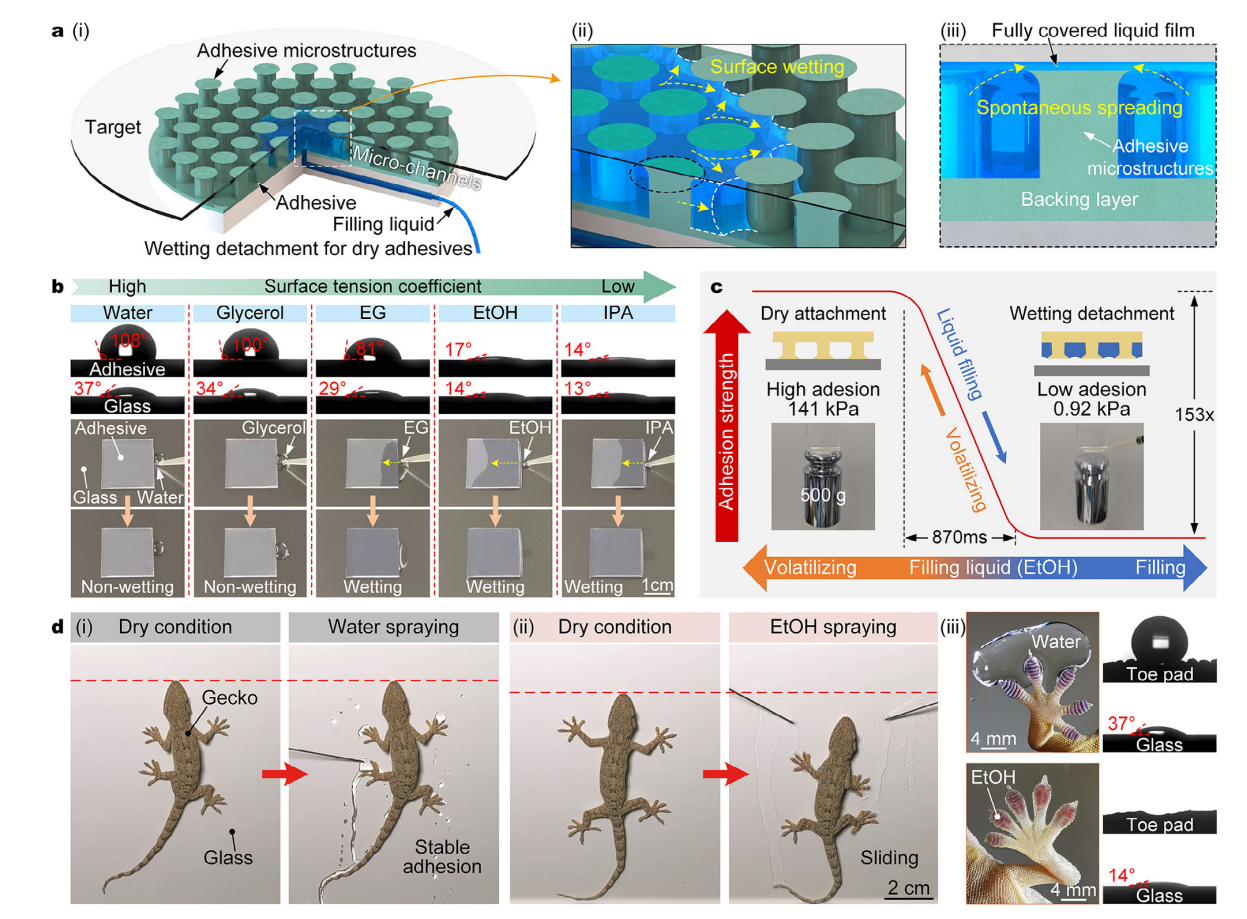
图1总体介绍了“润湿脱离”策略的设计概念、不同表面张力液体的润湿行为对比、粘合剂的性能指标(响应时间与载荷范围),以及壁虎在滴水和滴乙醇条件下攀附行为的对比实验。
图2通过实验快照和数值模拟,详细展示了乙醇在粘合剂与目标表面形成的微通道中的动态填充过程,分析了五种不同气-液界面形态(初始、凹、平、凸、合并)下的润湿力与流速变化,并研究了微结构几何参数对填充时间和粘附力的影响。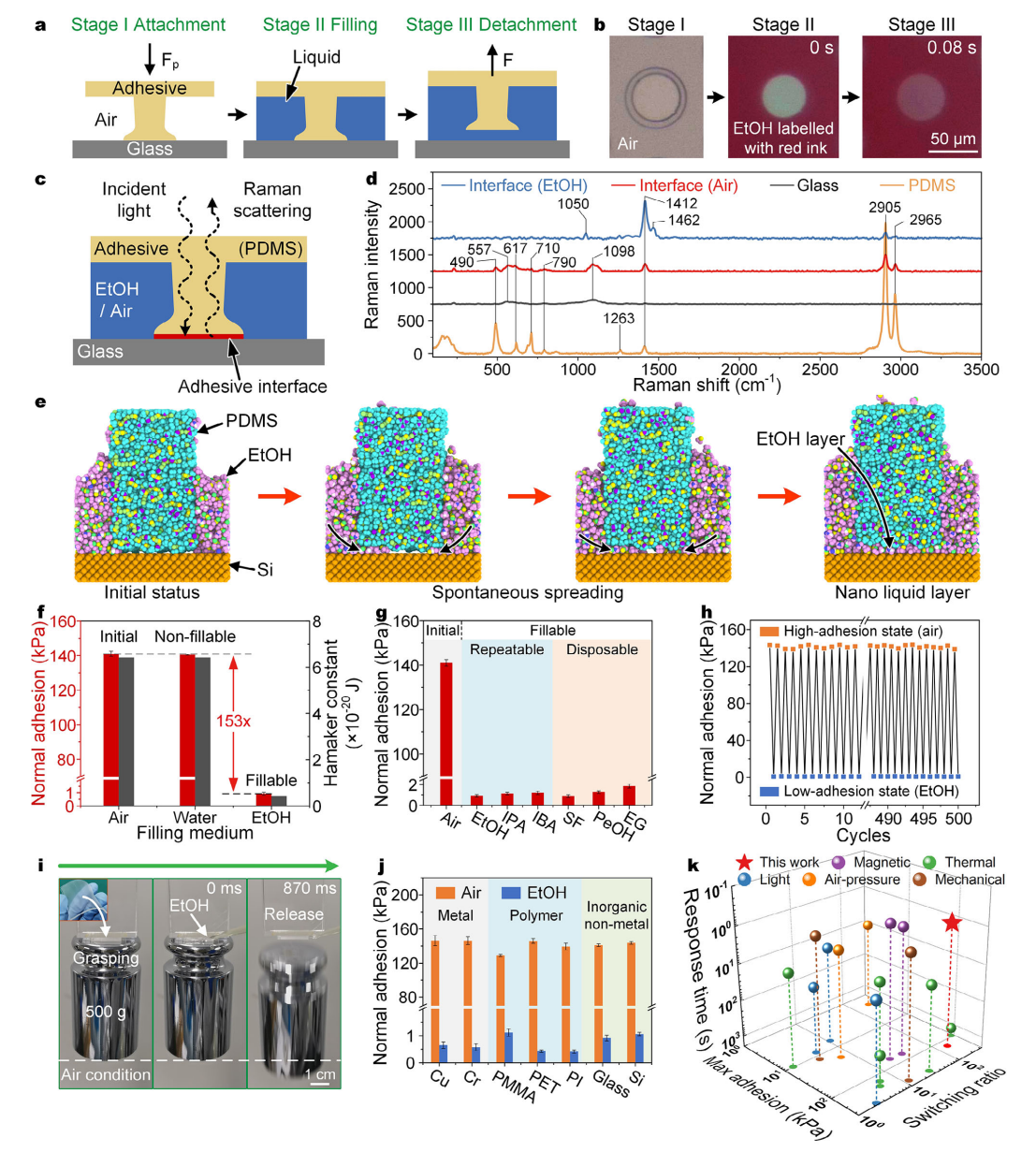
图3系统阐述了自发切换粘合剂的工作机制与性能,包括附着-填充-脱离三阶段界面变化、拉曼光谱与分子动力学模拟验证乙醇在界面的自发铺展、不同填充介质下的粘附力与哈梅克常数🔎变化、多种液体的适用性、循环耐久性、响应时间表征、在不同材料表面的适用性,以及与其它典型可切换粘合剂的综合性能对比。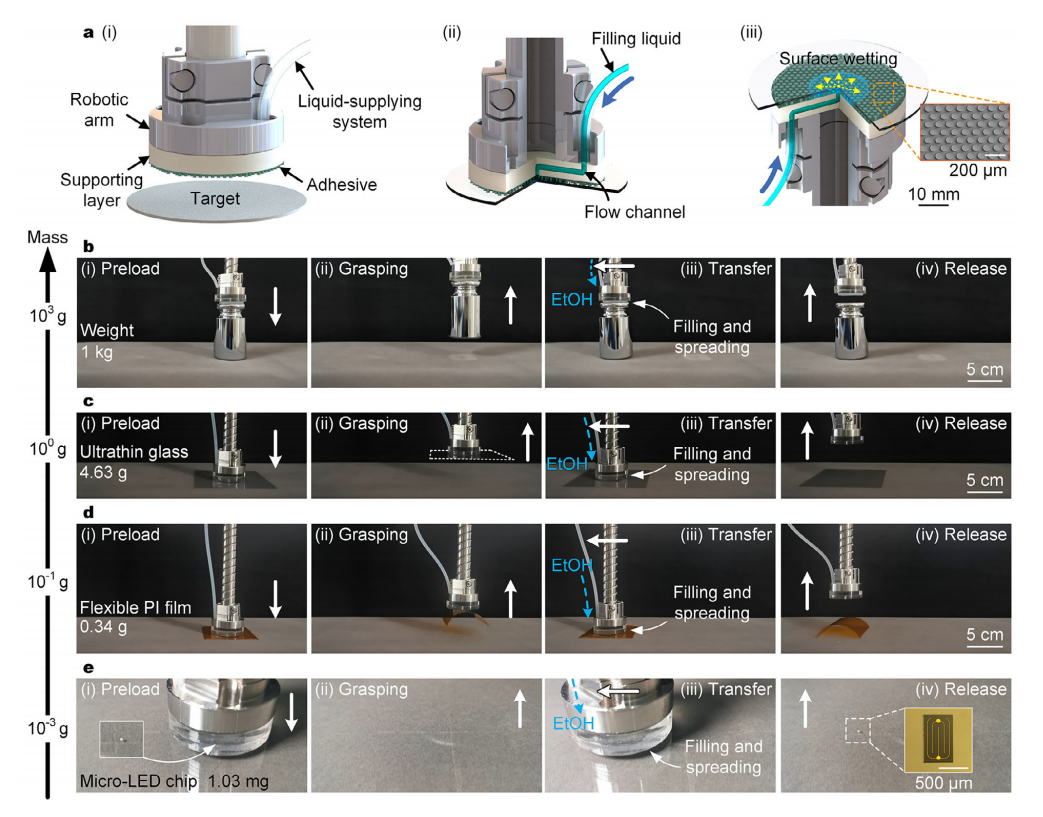
图4展示了基于表面润湿性的机器人操纵系统示意图及其在操纵不同物体(1千克金属重物、4.63克超薄玻璃、0.34克柔性PI薄膜、1.03毫克微型LED芯片)中的应用过程。
文章转自微信公众号“微流控信息网”
地址:陕西省西安市高新区锦业路32号锦业时代A1幢2620室

电话: 13709120575

邮箱:sxgesta@126.com

高校实验室安全是校园安全工作的重中之重,也是实验教学与科研活动顺利开展的前提底线。
